Real-Time Controller Board
Partners: LAUM (Le Mans University), CNRS.
The Real-Time Latency Challenge
To stabilize an acoustic control loop, every microsecond counts. At a 96 kHz sampling rate, the processor has less than to acquire the signal, solve non-linear Ordinary Differential Equations (ODEs), and update the output.
Critical Technology Choices
- Processor: Teensy 3.6 (ARM Cortex M4 @ 180 MHz) selected for its Floating Point Unit (FPU) and overall robustness.
- ADC Architecture (SAR): Utilized SAR (Successive Approximation Register) converters to minimize conversion latency compared to Sigma-Delta architectures.
- High-Resolution DAC: SPI extension to upgrade from 12-bit to 16-bit (DAC8831) to preserve the compensation signal’s dynamic range.
Electronics and Hardware Design
The board was designed to isolate high-speed digital signals from sensitive analog sections. The final prototype is integrated into a shielded enclosure with BNC connectors for laboratory environments.

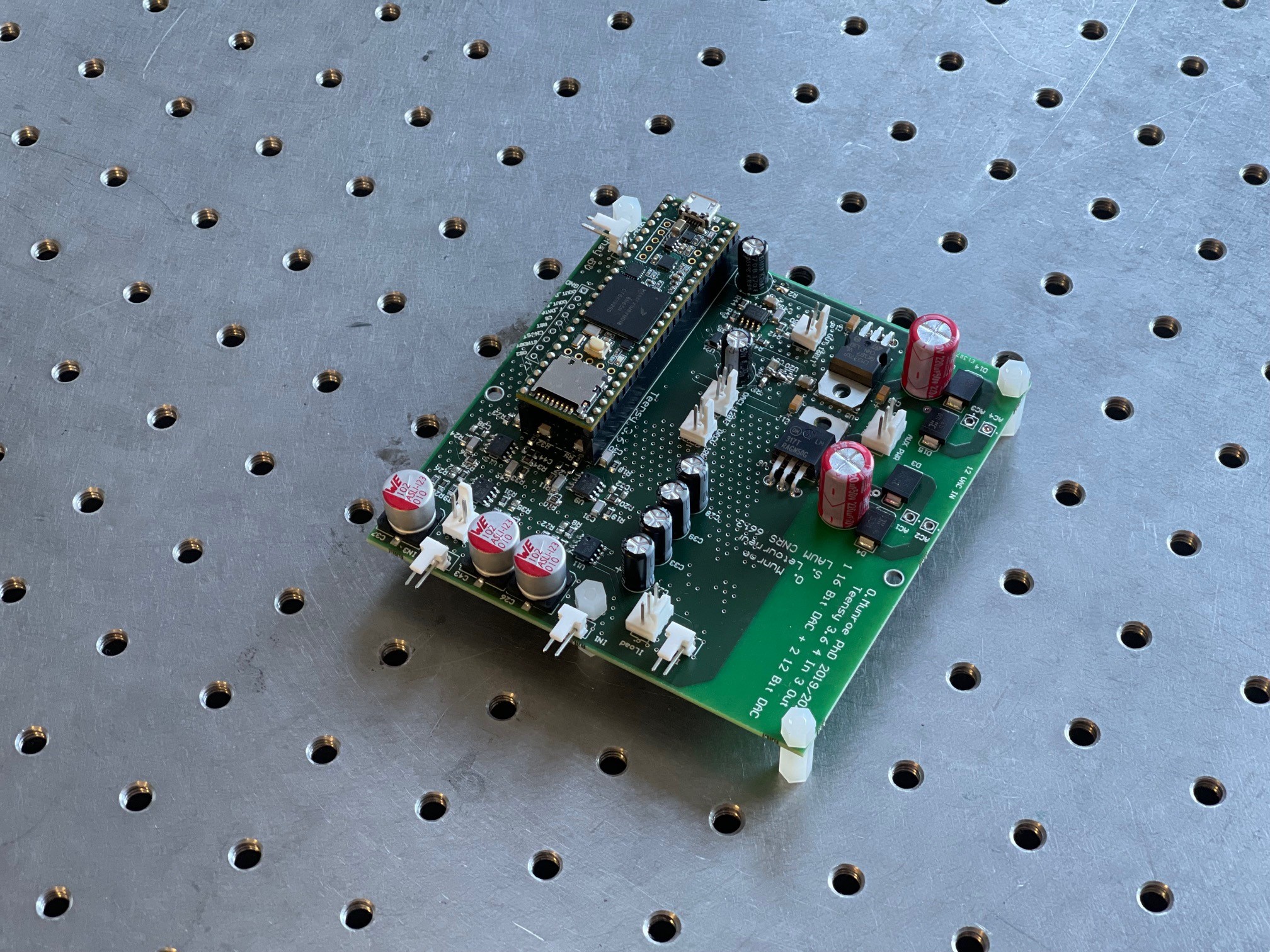
PCB Layout (Altium Designer)
Component placement was optimized to separate power, analog, and digital domains on a dual-layer circuit.
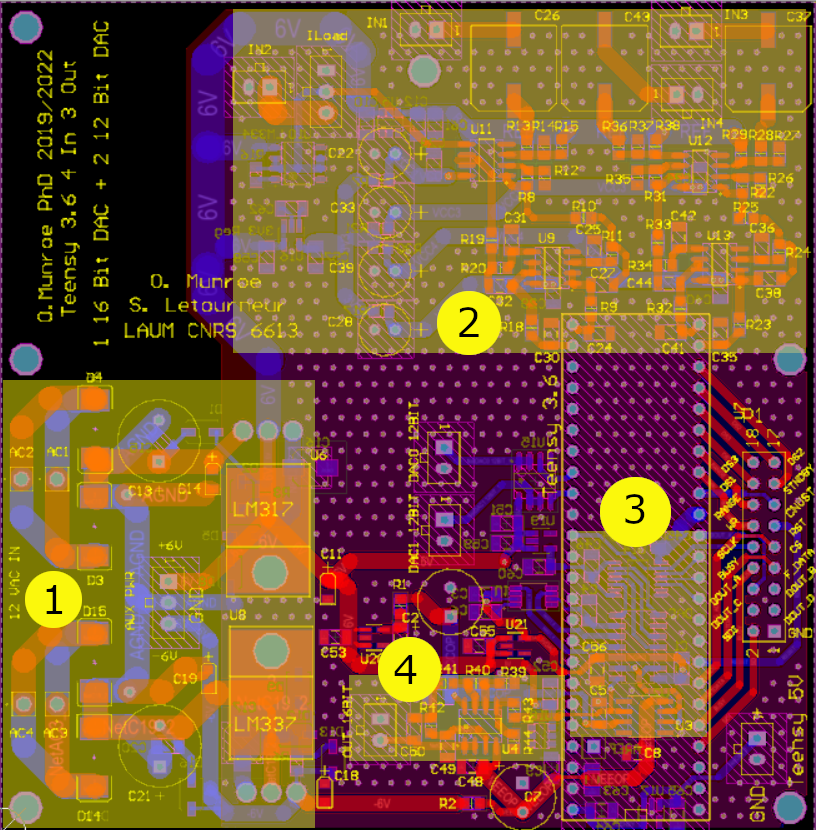
| ID | Functional Block | Technical Role |
|---|---|---|
| 1 | Regulation (Bottom L.) | Linear regulated PSU (LM317/337) for symmetrical audio rails. |
| 2 | Input (Top R.) | Signal conditioning, anti-aliasing, and ADC bias (1.65V). |
| 3 | Digital (Under Teensy) | External 16-bit DAC and level shifters for high-speed SPI bus. |
| 4 | Interface (Center) | Bipolar output stage and compensation signal buffering. |
- Input Conditioning: OPA2325 based stage providing the DC offset (bias) and ADC input protection.
- Anti-aliasing Filter: 2nd order filter calculated with an cutoff frequency.
- Bipolar Output: The DAC8831 is coupled with an ADA4084 precision amplifier to generate a symmetrical audio signal ().
Characterization and Performance
The controller was validated through a series of high-resolution tests. These three analyses confirm that the board provides sufficient fidelity for compensation algorithms while maintaining minimal latency.



Specifications Summary (V3)
| Parameter | Value | Unit | Notes |
|---|---|---|---|
| Total Delay (Latency) | Measured via cross-correlation @ 100 Hz | ||
| SINAD | dB | Signal-to-noise and distortion ratio | |
| ENOB | bits | Effective Number of Bits | |
| Bandwidth | kHz | At -3 dB | |
| Full Scale (Input) | V | Peak-to-peak voltage |
References and Publications
| Type | Description |
|---|---|
| PhD Thesis | Munroe, O. “Real time loudspeaker control”, Chapter: Real Time Controller, Le Mans University, 2022. |