Real-Time Controller: Inversion & Adaptation
Publication: Journal of the Audio Engineering Society (JAES), March 2021.
Partners: LAUM (Le Mans University), CNRS.
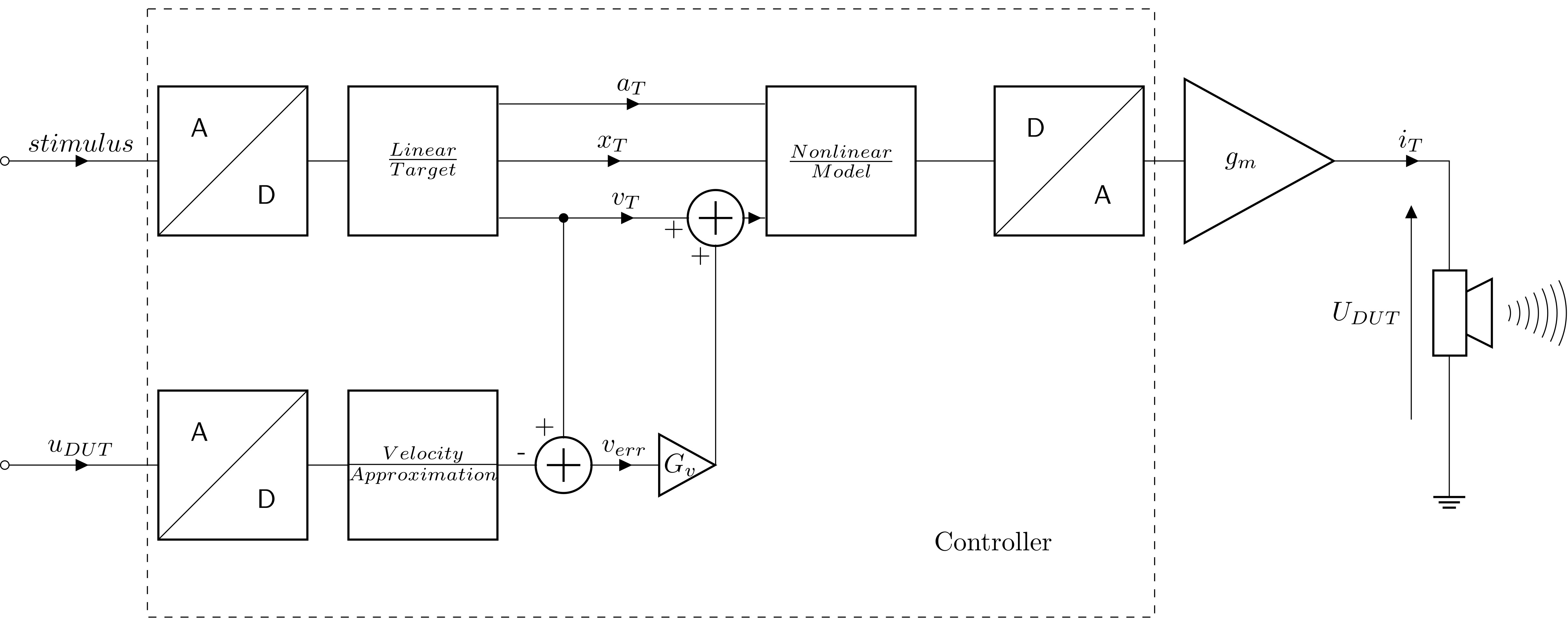
Triple Control Architecture
The control system is based on a hybrid structure that combines the precision of offline simulation with the responsiveness of real-time adaptation.
1. Feedforward (Model Inversion)
Linearization is achieved by inverting the electromagnetic parameters. To ensure maximum accuracy without the computational overhead of live Finite Element Analysis (FEA), parameters are modeled using polynomial functions fitted to FEA data.
The following parameters are injected into the inverse model as displacement-dependent () polynomials:
- Force Factor:
- Blocked Impedance Components: , , , ,
This method captures complex motor nonlinearities (saturation, eddy currents) while maintaining minimal CPU load on the DSP.
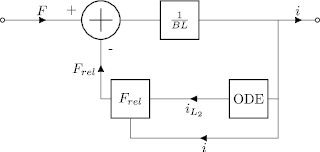
Reluctance Force Compensation
The reluctance force is canceled by a unit feedback algorithm using a single-sample delay (). Due to the high sampling frequency, the previous current value is used to calculate the correction:
2. Feedback (Stability)
A light feedback gain is applied to stabilize the system against model uncertainties and external disturbances, ensuring the overall robustness of the closed-loop control.
3. Adaptation (Velocity Error Update)
Unlike the electromagnetic parameters fixed by FEA polynomials, the mechanical stiffness is identified continuously.
The algorithm compares the target velocity (from the reference model) with the estimated velocity of the loudspeaker:
The error allows for real-time updates of the polynomial, compensating for aging, temperature fluctuations, and mechanical creep of the suspensions.
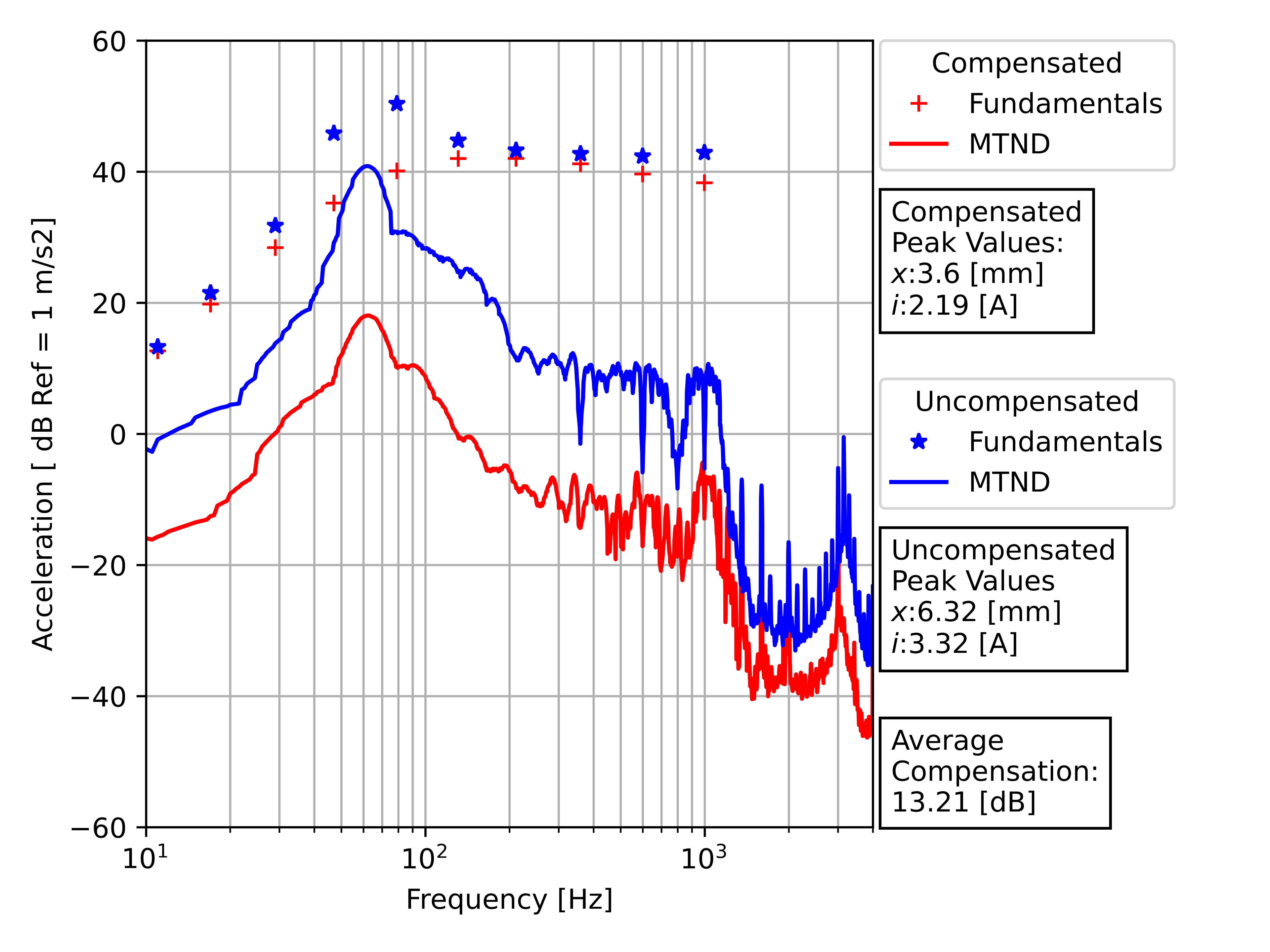
Innovations & Results
- Polynomial Precision: Fitting to FEA data allows for faithful modeling of motor behavior, including the effects of shorting rings.
- Distortion Reduction: A measured decrease of 12 dB in harmonic and intermodulation distortion.
- DC Stability: Elimination of static coil offset through active reluctance compensation.
References and Publications
| Type | Description |
|---|---|
| Journal (JAES) | O. Munroe, A. Novak, L. Simon, “Reluctance Force Modelling and Compensation”, JAES, 2021. DOI:10.17743/jaes.2021.0054 |
| PhD Thesis | O. Munroe, “Real time loudspeaker control”, PhD Thesis, Le Mans University, 2022. Access via HAL |