Impédance de sortie de l'amplificateur : la face cachée du contrôle des transducteurs
Dans les manuels d’ingénierie audio classiques, l’amplificateur idéal est traité comme une source de tension parfaite avec une impédance de sortie () rigoureusement égale à zéro. Cette perspective a donné naissance à une obsession industrielle généralisée pour le fameux « facteur d’amortissement » (damping factor). Pourtant, lorsqu’on couple un amplificateur réel à un transducteur électromagnétique complexe dont l’impédance dépend de la fréquence, une impédance de source de zéro ohm est loin de représenter la solution miracle.
En réalité, est le paramètre caché qui modifie tout : de l’amortissement électromagnétique à la compression thermique, en passant par les non-linéarités intrinsèques du transducteur. Passer d’une source de tension traditionnelle à une architecture d’amplification en courant () transforme radicalement cette transduction électroacoustique. En imposant un courant prescrit à travers la charge, l’amplificateur s’affranchit des variations électriques localisées de la bobine mobile. Toutefois, le déplacement de cette frontière d’impédance introduit des pénalités physiques, mécaniques et thermiques majeures.
Atténuation de l’hystérésis et de la distorsion de flux
Dans un système standard piloté en tension, le courant d’excitation est dicté par la loi d’Ohm appliquée à l’impédance complexe du transducteur :
Le matériau du noyau magnétique présentant de l’hystérésis et une perméabilité non linéaire, l’inductance instantanée varie dynamiquement en fonction du déplacement du cône et du courant . Ce phénomène module l’impédance électrique et engendre une distorsion sévère de la forme d’onde du courant.
Sous une commande en courant, l’amplificateur module dynamiquement sa tension de sortie afin de maintenir le courant cible, neutralisant ainsi ces non-linéarités. La force motrice devient strictement proportionnelle au signal d’entrée, contournant entièrement la boucle de distorsion magnétique :
En éliminant la dépendance de la conversion tension-courant vis-à-vis du noyau électromagnétique non linéaire, l’amplification en courant supprime drastiquement la distorsion harmonique induite par l’hystérésis, en particulier dans les fréquences médiums où l’inductance de la bobine mobile est dominante.
La pénalité de résonance : perte de l’amortissement motionnel
Le inconvénient le plus critique de l’amplification en courant se manifeste à la fréquence de résonance mécanique fondamentale du transducteur (). Lorsque la bobine mobile se déplace dans l’entrefer magnétique, elle génère une force contre-électromotrice (FCÉM) proportionnelle à sa vitesse :
Dans un système piloté en tension, la faible impédance de sortie () crée une boucle fermée permettant à cette FCÉM de générer un contre-courant. Ce courant induit agit comme un frein électromagnétique, fournissant l’amortissement électrique vital () nécessaire au contrôle de la résonance mécanique.
Sous une commande en courant (), cette boucle est ouverte. L’impédance interne infinie de l’amplificateur empêche tout flux de courant de FCÉM. Par conséquent, la résonance fondamentale perd tout amortissement électrique. Le système repose uniquement sur le faible amortissement mécanique () du haut-parleur, provoquant un pic massif de traînage transitoire et de distorsion acoustique autour de .
L’angle mort du signal multitonal : mise en évidence par la mesure via le FE100
Historiquement, une grande partie de la littérature académique a encensé l’amplification en courant pour sa réduction de la distorsion dans le médium, tout en traitant la pénalité à la résonance comme un problème localisé et simple à gérer. Ce consensus architectural découlait en réalité de méthodologies de test obsolètes. Les évaluations industrielles standards s’appuyaient massivement sur des stimuli à fréquence unique (sinus balayé), qui masquaient par nature le comportement complexe de l’intermodulation sous des charges réelles.
La dégradation réelle de la fidélité du signal devient incontestable lorsque l’on passe d’une excitation monotone à un stimulus multitonal, un phénomène documenté en détail dans ma thèse de doctorat [1].
Lorsqu’un signal multitonal complexe balaie le spectre, les non-linéarités structurelles du transducteur (telles que les variations du facteur de force et de l’inductance de la bobine ) génèrent des harmoniques d’ordre élevé et des produits de distorsion d’intermodulation (IMD). Sous une commande en courant (), si l’un de ces produits de distorsion chute aux alentours de la fréquence de résonance mécanique fondamentale (), il frappe un résonateur non amorti. Parce que l’amortissement électrique est complètement supprimé, le système repose uniquement sur le haut facteur de qualité mécanique () du haut-parleur, qui amplifie de manière acoustico-mécanique ces produits de bruit.
Ce phénomène est quantifié par une mesure physique directe ci-dessous. Les données représentent un spectre d’accélération dans le domaine fréquentiel, capturé à l’aide d’un accéléromètre miniature monté physiquement sur le cône d’un transducteur Fostex FE1000. Le haut-parleur a été excité par un stimulus multifréquence sous une commande en courant brute versus une commande en courant compensée non linéaire :
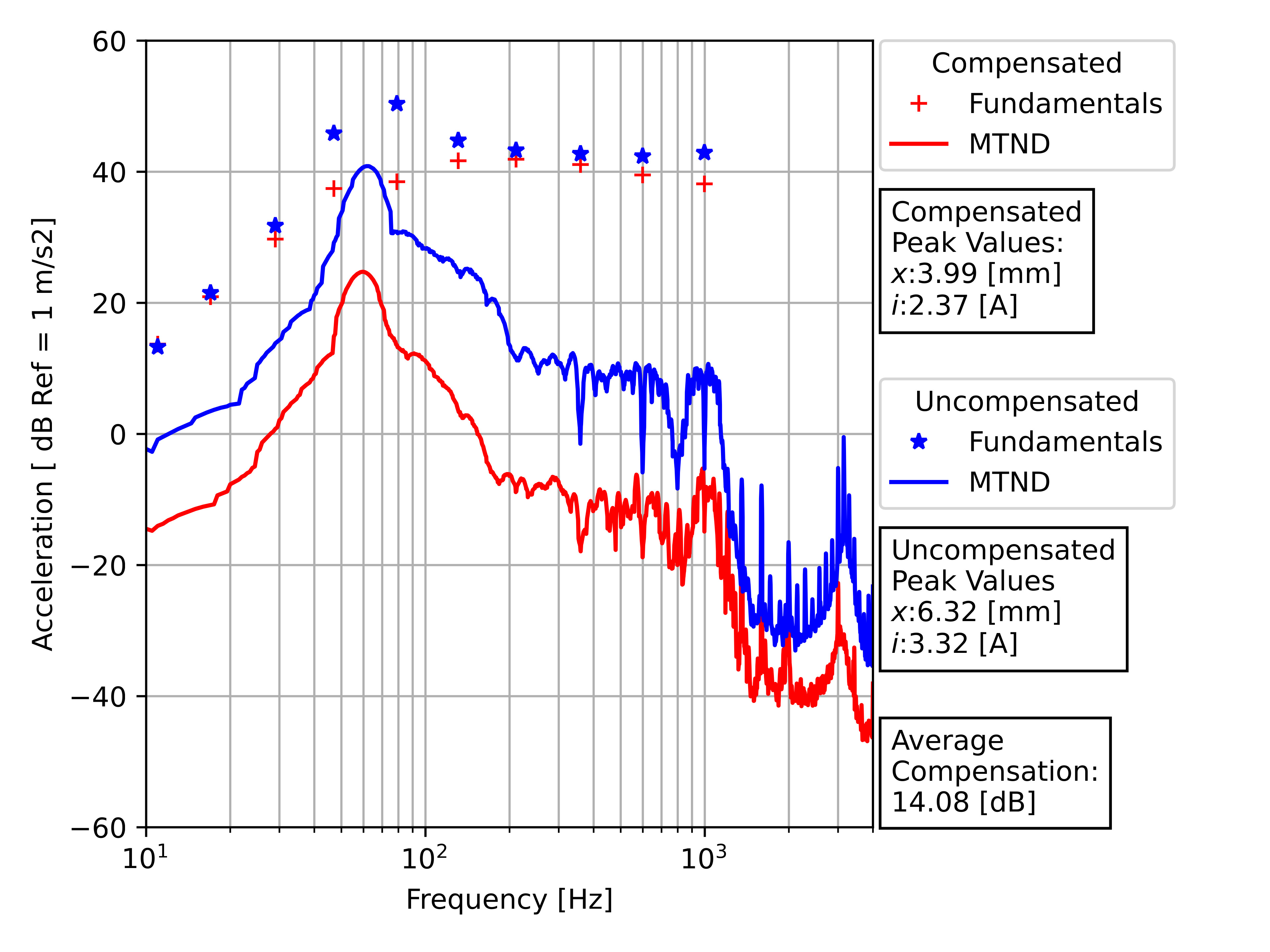
Comme le montre la réponse non compensée (courbe bleue), le plancher de distorsion multitonale (MTND) subit un gonflement résonant massif entre et , grimpant jusqu’à atteindre un écart de seulement à sous les tons d’excitation fondamentaux. Cela met en évidence la défaillance catastrophique de la commande en courant brute à l’approche de la résonance : le non amorti se comporte comme une loupe mécanique pour les produits d’intermodulation.
En appliquant un algorithme de compensation non linéaire conçu pour prédistorcer le signal de commande en fonction des variables d’état physiques — ciblant spécifiquement le déplacement crête du transducteur et le courant — l’excursion maximale est ramenée en toute sécurité de à . Le résultat est une atténuation moyenne du plancher de distorsion multitonale de 14,08 dB sur l’ensemble de la bande (courbe rouge), restaurant efficacement la fidélité dans le médium sans sacrifier les avantages intrinsèques de la commande à haute impédance.
Compensation logicielle vs. matérielle : courant compensé vs. bagues de court-circuit en tension
Un ingénieur pourrait objecter que l’amplification en courant est une solution logicielle complexe à un problème qui peut être résolu mécaniquement à l’aide de bagues de court-circuit en cuivre ou en aluminium (bagues de Faraday) insérées dans la pièce polaire de l’aimant. Pour tester cette hypothèse, un second benchmark a été réalisé, comparant le FE100 piloté en courant avec compensation non linéaire à un Fostex FE120 alimenté par une source de tension traditionnelle (). Le FE120 intègre nativement une bague de court-circuit physique conçue pour atténuer les variations d’inductance de la bobine mobile et les distorsions par courants de Foucault.
Le profil d’accélération comparatif, capturé via le même protocole d’accéléromètre sur cône, apporte un éclairage profond sur les compromis de conception des transducteurs modernes :
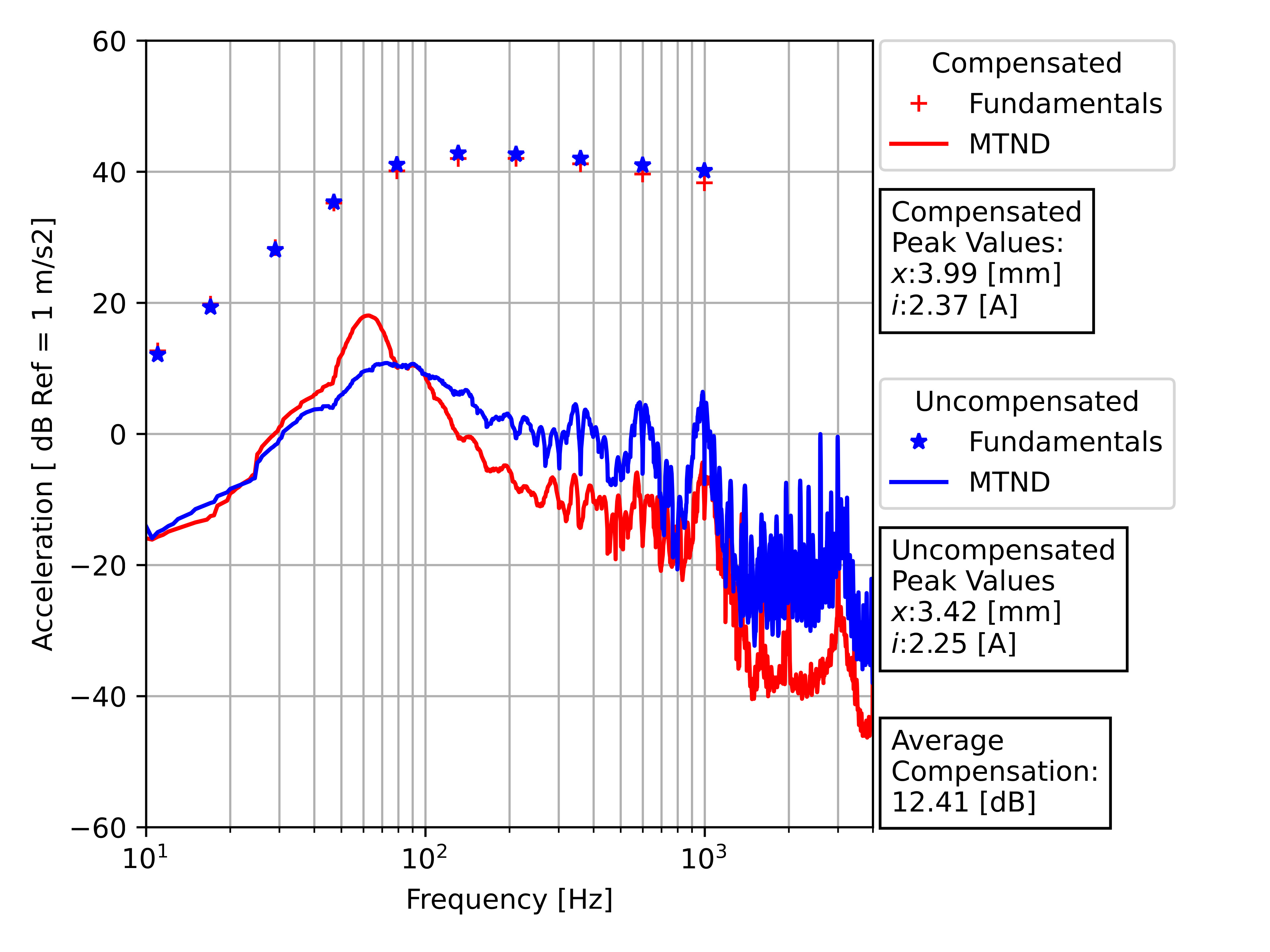
Le spectre révèle un croisement architectural net :
- La zone de résonance (): Le FE120 piloté en tension (courbe bleue) conserve un plancher de distorsion intrinsèquement plus bas autour de . Cela s’explique par le fait que le shunt de la FCÉM au niveau matériel, assuré par l’impédance de zéro ohm de la source de tension, étouffe le traînage motionnel d’une manière qu’une mise à l’échelle algorithmique de la tension ne peut pas reproduire pleinement sans une sensibilité extrême aux variables d’état.
- Le médium et les hautes fréquences ( à ): Le FE100 piloté en courant et compensé (courbe rouge) surpasse nettement la bague de court-circuit physique, abaissant de manière significative le plancher de distorsion multitonale (MTND). Bien qu’une bague de Faraday réduise partiellement la modulation de flux, elle ne peut linéariser le système au même degré qu’une boucle active d’amplification en courant, qui découple entièrement le courant d’excitation des non-linéarités du matériau du noyau.
En fin de compte, l’approche par commande en courant active et non linéaire garantit un avantage de compensation moyen de 9,35 dB sur l’ensemble de la bande passante par rapport à une commande en tension standard. Cela démontre que la transconductance pilotée par DSP peut efficacement supplanter — et dans les médiums, dépasser — les optimisations matérielles électromagnétiques traditionnelles.
Accélération thermique et dissipation de puissance
Les transducteurs affichent naturellement un pic d’impédance significatif à dû à l’impédance motionnelle, parallèlement à une hausse de l’impédance aux hautes fréquences dictée par l’inductance de la bobine. Puisqu’un amplificateur en courant doit garantir un courant constant indépendamment de l’impédance instantanée de la charge , il doit ajuster sa tension de sortie selon la relation :
Aux fréquences où culmine, l’amplificateur est contraint de délivrer des tensions nettement plus élevées pour maintenir le même courant. Cette augmentation continue de la tension accroît considérablement la dissipation de puissance réelle () au sein de la bobine mobile, accélérant la compression thermique et déplaçant l’équilibre thermique du transducteur beaucoup plus rapidement qu’un équivalent configuré en tension.
Tension de rail et stress des transistors
Piloter une charge inductive avec un courant constant impose de lourds défis à la topologie de l’étage de sortie de l’amplificateur. À mesure que la fréquence augmente, la réactance inductive grimpe linéairement. Pour maintenir un courant constant à haute fréquence, l’amplificateur nécessite des rails d’alimentation électrique () exceptionnellement élevés afin de surmonter la FCÉM inductive :
Lorsque l’angle de phase entre le courant imposé et la tension de sortie élevée s’élargit en raison de cette charge fortement inductive, les transistors de sortie doivent endurer des chutes de tension sévères tout en conduisant simultanément des courants de crête. Cela déplace le point de fonctionnement dangereusement près des limites de la zone de fonctionnement sécurisé (SOA - Safe Operating Area), augmentant de manière critique la dissipation thermique au sein même du silicium de l’amplificateur et exigeant des solutions de dissipation thermique agressives.
References and Publications
| Type | Description |
|---|---|
| PhD Dissertation | Munroe, O. “Real Time Loudspeaker Control”, Acoustics [physics.class-ph], Le Mans Université, 2022. NNT: 2022LEMA1022. ⟨tel-03937151⟩ |