Contrôleur Temps Réel : Inversion et Adaptation
Publication : Journal of the Audio Engineering Society (JAES), March 2021.
Partenaires : LAUM (Université du Mans), CNRS.
Architecture Triple de Contrôle
Le système de contrôle repose sur une structure hybride combinant la précision de la simulation hors-ligne et la réactivité de l’adaptation en temps réel.
1. Feedforward (Inversion de Modèle)
La linéarisation repose sur l’inversion des paramètres électromagnétiques. Pour garantir une précision maximale sans la lourdeur des calculs d’éléments finis en direct, les paramètres sont modélisés par des fonctions polynomiales ajustées sur des données FEA.
Les paramètres suivants sont injectés dans le modèle inverse sous forme de polynômes dépendant du déplacement :
- Facteur de force :
- Composantes de l’impédance bloquée : , , , ,
Cette méthode permet de capturer les non-linéarités complexes du moteur (saturation, courants de Foucault) tout en maintenant une charge CPU minimale sur le DSP.
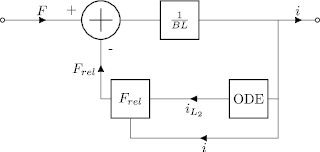
Compensation de la Force de Réluctance
La force de réluctance est annulée par un algorithme de feedback unitaire utilisant un retard d’un échantillon (). Comme la fréquence d’échantillonnage est élevée, on utilise le courant précédent pour calculer la correction :
2. Feedback (Stabilité)
Un léger gain de rétroaction est appliqué pour stabiliser le système face aux incertitudes du modèle et aux perturbations externes, assurant la robustesse globale de l’asservissement.
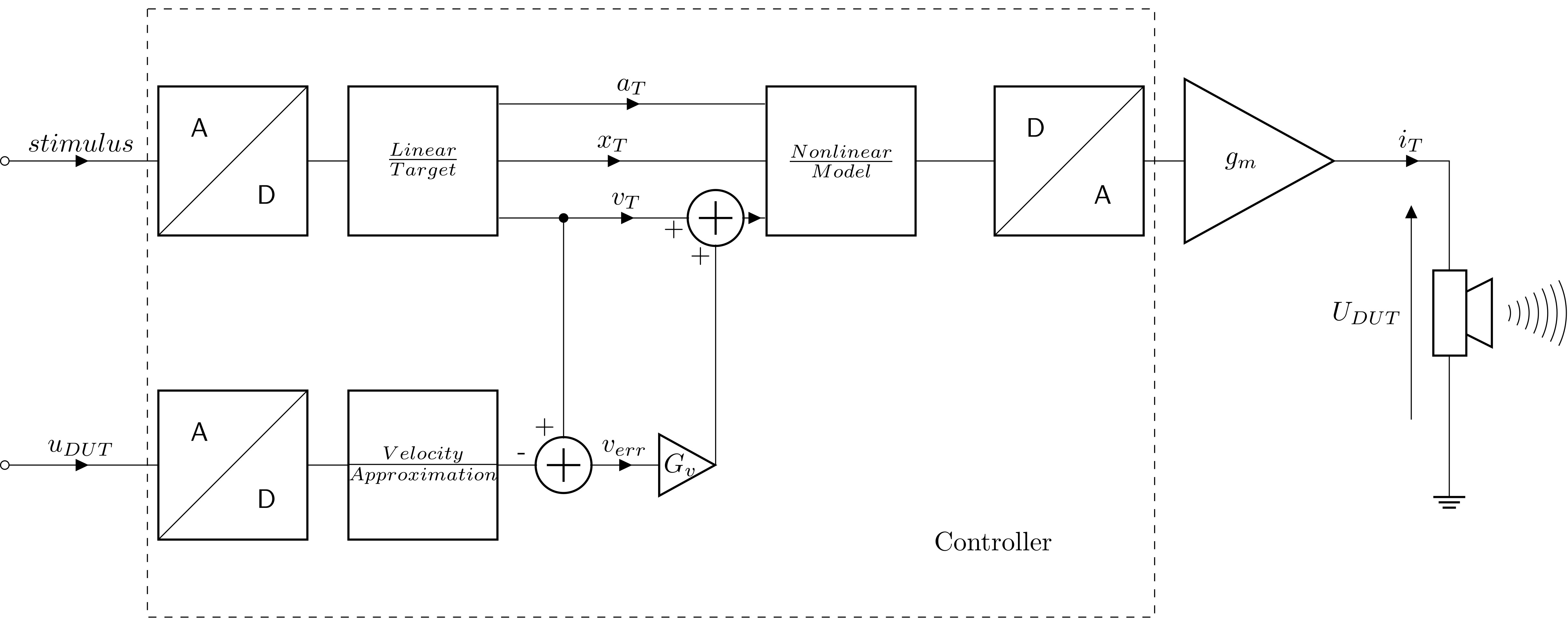
3. Adaptation du (Mise à jour par erreur de vitesse)
Contrairement aux paramètres électromagnétiques fixés par les polynômes FEA, la raideur mécanique est identifiée en continu.
L’algorithme compare la vitesse cible (issue du modèle de référence) avec la vitesse estimée du haut-parleur :
L’erreur permet de mettre à jour le polynôme de en temps réel, compensant ainsi le vieillissement, la température et le fluage mécanique des suspensions.
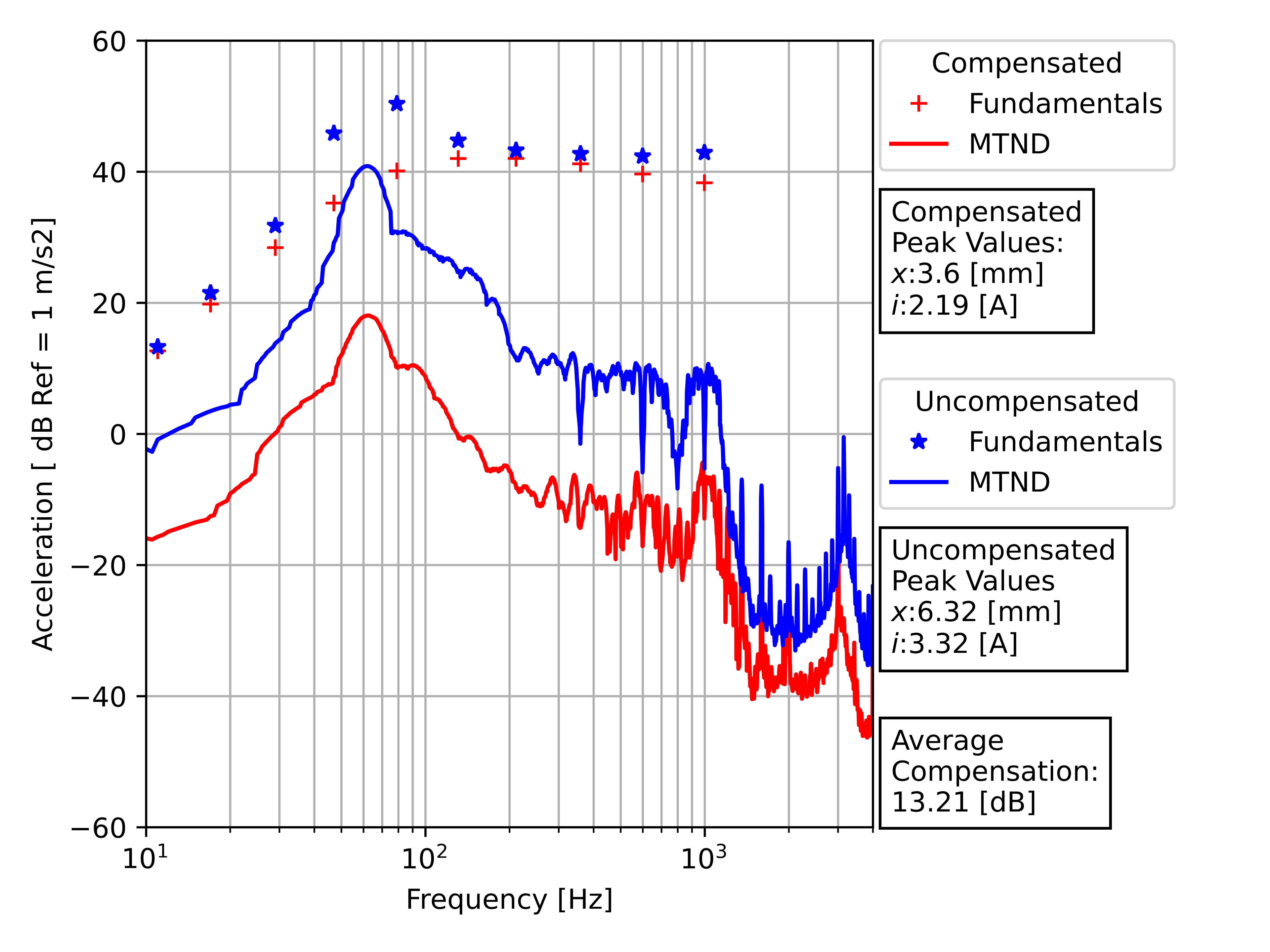
Innovations et Résultats
- Précision Polynomiale : L’ajustement sur données FEA permet de modéliser fidèlement le comportement du moteur, incluant l’effet des bagues de court-circuit.
- Réduction de Distorsion : Une diminution de 12 dB de la distorsion harmonique et d’intermodulation a été mesurée.
- Stabilité DC : Suppression du décentrage statique de la bobine par la compensation active de la réluctance.
Références et Publications
| Type | Description |
|---|---|
| Journal (JAES) | O. Munroe, A. Novak, L. Simon, “Reluctance Force Modelling and Compensation”, JAES, 2021. [DOI:10.17743/jaes.2021.0054] (https://doi.org/10.17743/jaes.2021.0054) |
| Thèse de Doctorat | O. Munroe, “Real time loudspeaker control”, Thèse de doctorat, Le Mans Université, 2022. (https://theses.hal.science/tel-03937151) |